



Oct 18, 2012 , by
Public Summary Month 9/2012
We started to implement an automated error correction. The detection of an error we aim to decode from brain signals that are evoked after an unexpected feedback.
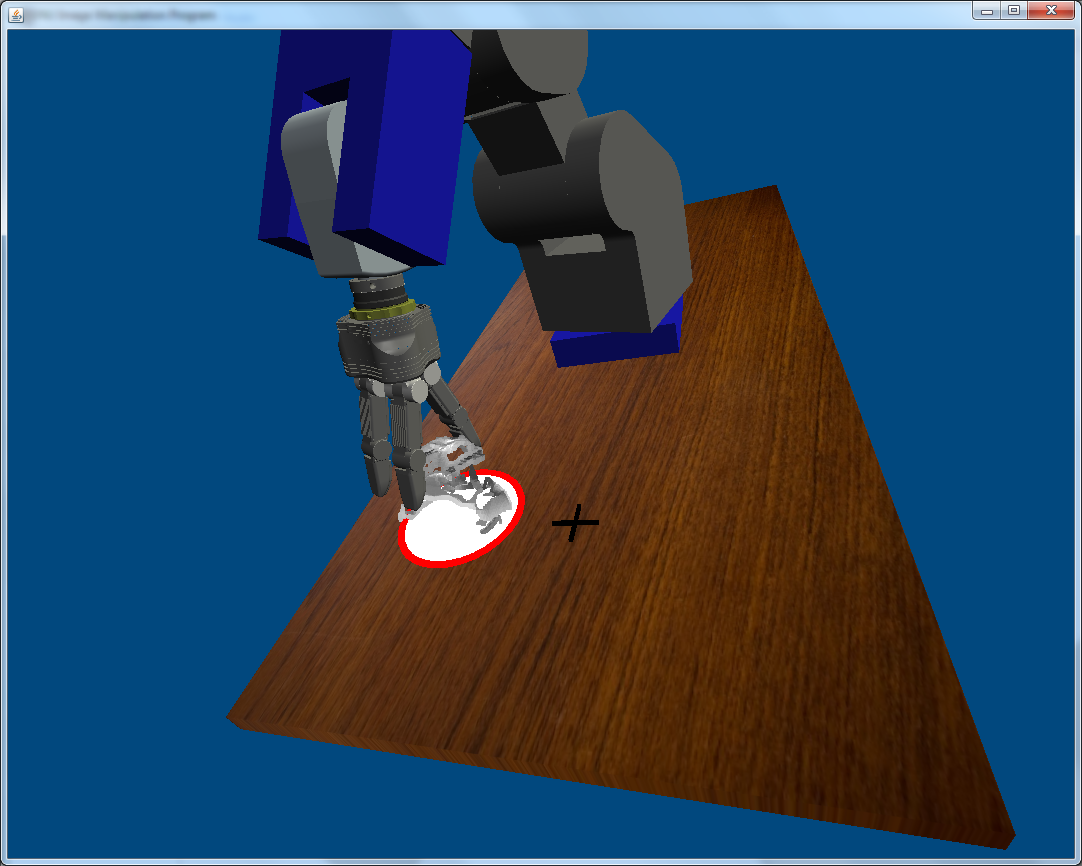
We succeeded to complete the steps from object recognition to a successful grasp of the robotic gripper. In the following we present the underlying tool-chain.


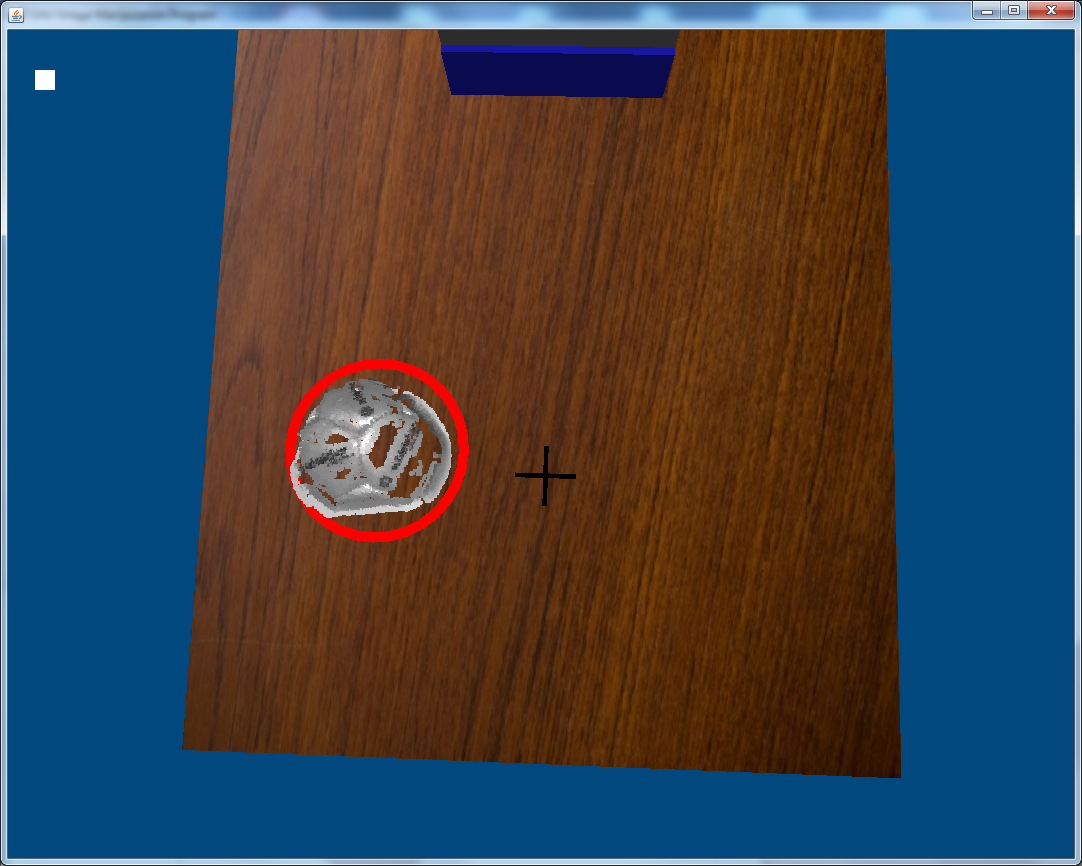
The scene scan consists of recording two stereoscopic images. We extract point clouds that circumscribe the objects.
The grasp-planner iteratively moves the robot in the force-field.
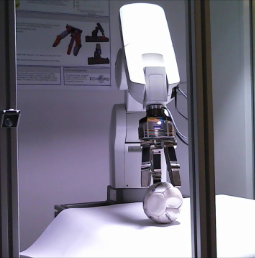
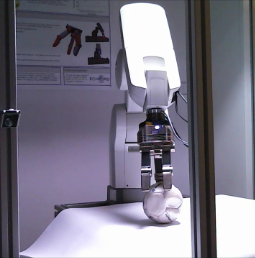
The robot is moved synchronously with its virtual model.




Tags:
public summary
bracog



