



Dec 20, 2011 , by
Public Summary Month 11/2011
TASK 3, 4
So far our tests in a movement imagery task revealed huge performance differences between subjects. In our MEG setup we found that magnetic activity of the heart is the source of another important artefact. The main work in this project phase will be the adjustment of the algorithms to allow for online removal of these artefacts.
TASK 5:
We integrated the functionality of the selection prototype, the virtual robot and grasp planner to build the virtual prototype.
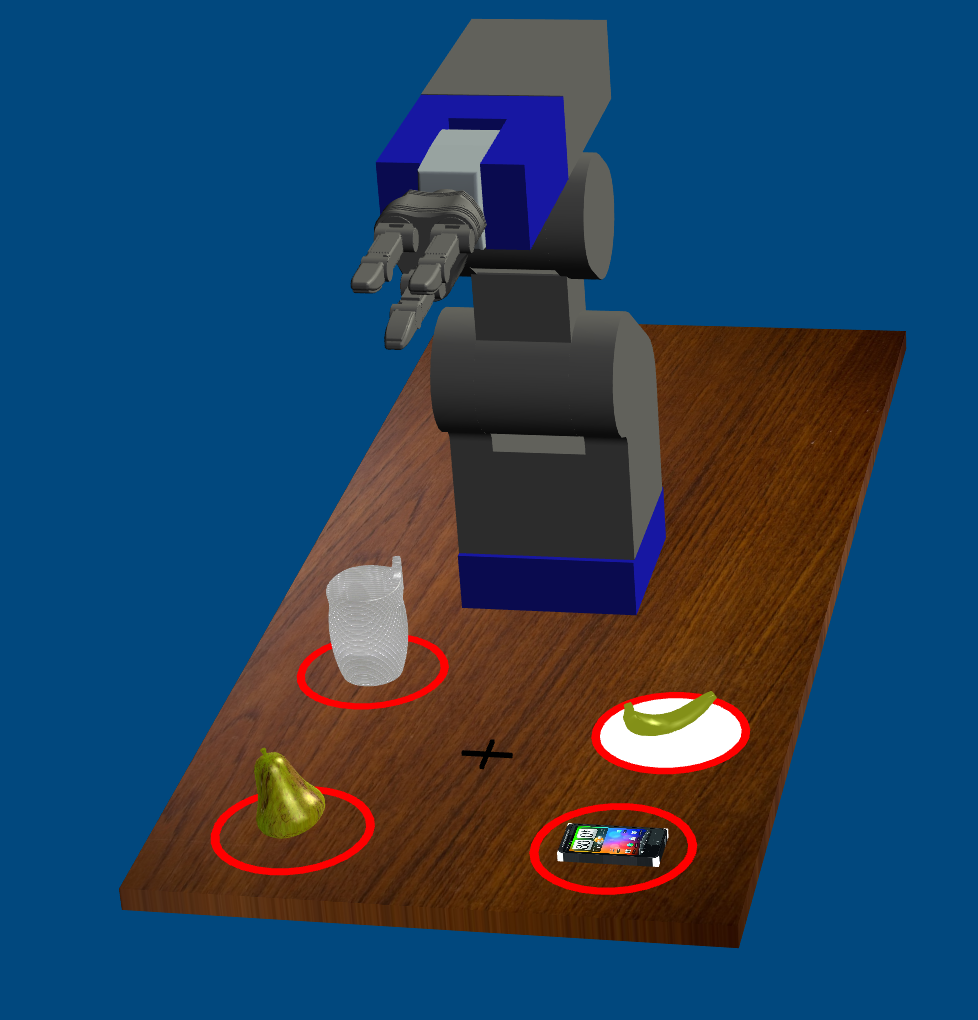
Fig. 1 Integrated Scenario
TASK 7:
The grasp planning is still very time-consuming. To reduce the waiting period until completion of the planned grasp we optimized the process in the following way: The transformation calculation from attractive or repulsive force at the fingertip of the grasper to a torque in the joints of the robot is parallelized.
Currently the system comprises the parts depicted in Fig. 2.
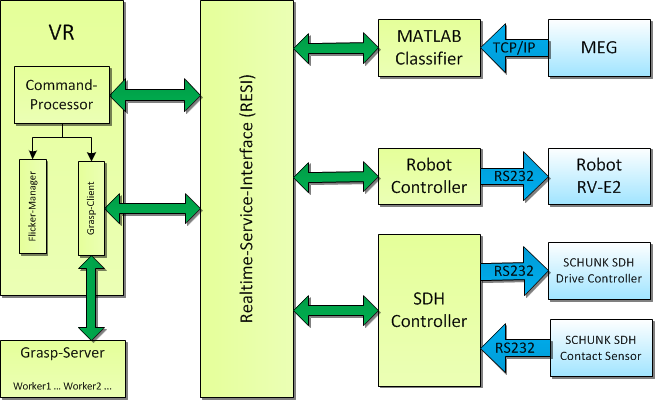
Fig. 2 System Structure



