



Feb 10, 2012 , by
Public Summary Month 1/2012
TASK 3:
Figure 1 depicts the achieved rates of correctly detected objects in the 4 target SSVEP selection task for all eleven participants so far. This shows the successful application of the task in the majority of subjects. 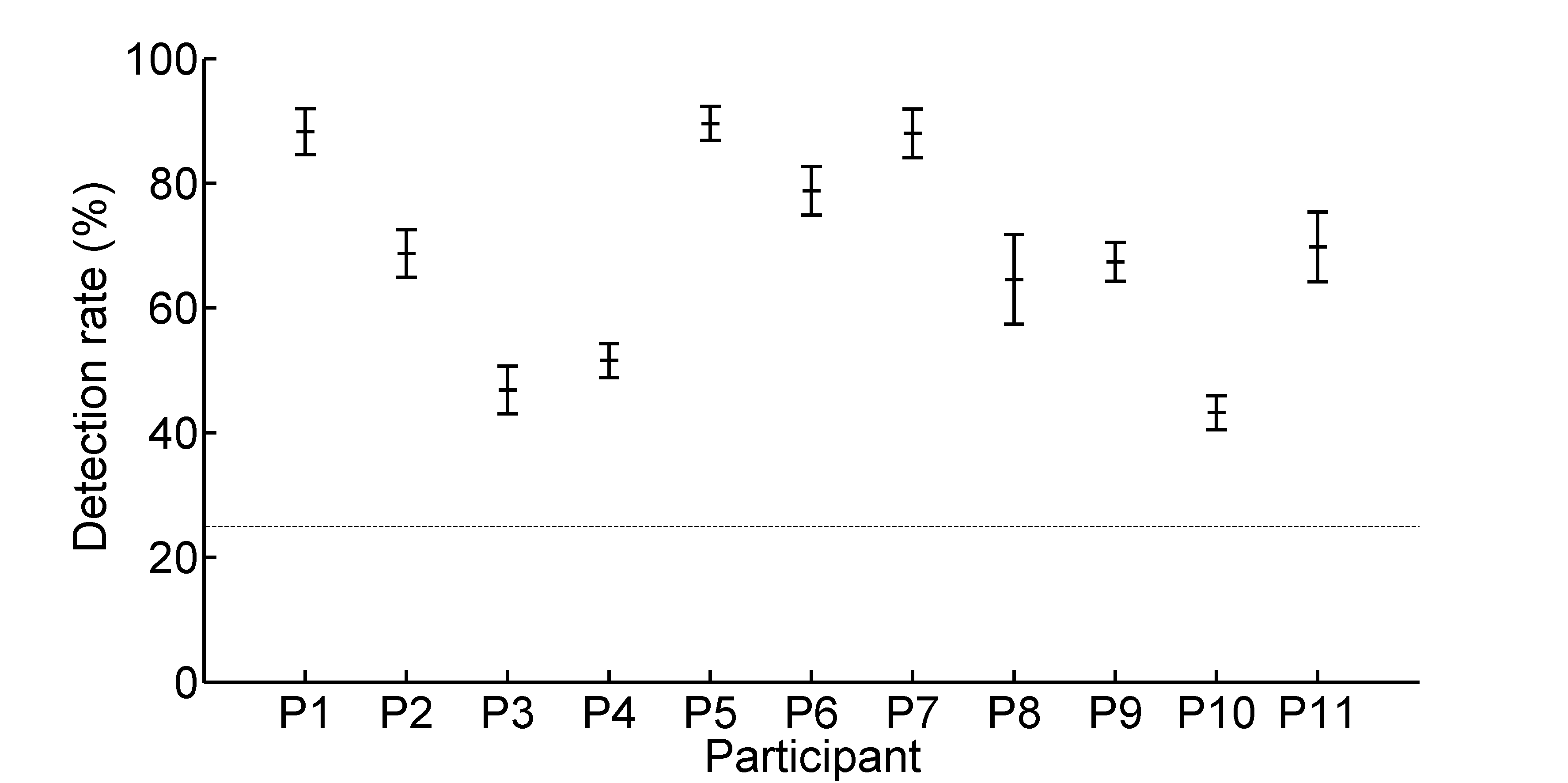
Fig. 1 Average detection rate of single subjects. Error bars indicate the standard error across sessions (4 to 6 sessions). The guessing level for a balanced 4 target session is at 25% (dotted line).
TASK 4:
Based on simultaneous MEG and ECG recordings of 3 additional subjects we currently test algorithms to remove ECG artifacts from the MEG signals without removing information in brain signals.
TASK 10:
Objects with strong convex surfaces prevent the virtual grasper to get a force closure grasp. Therefore, we temporarily neglect repulsive forces driving the grasper away from the target center point. The calculation time for a force closure grasp is reduced to less than 5 s for the majority of CAD-generated grasping targets.
For fine concave structures (e.g. bristles) the BSP-tree collision detection algorithm requires too much time and is not parallelizable. We developed a new collision detection strategy which we will call shriveled bounds. Although the bristles of the toothbrush (see Fig. 2) do not prevent the object from being grasped further optimization is required. 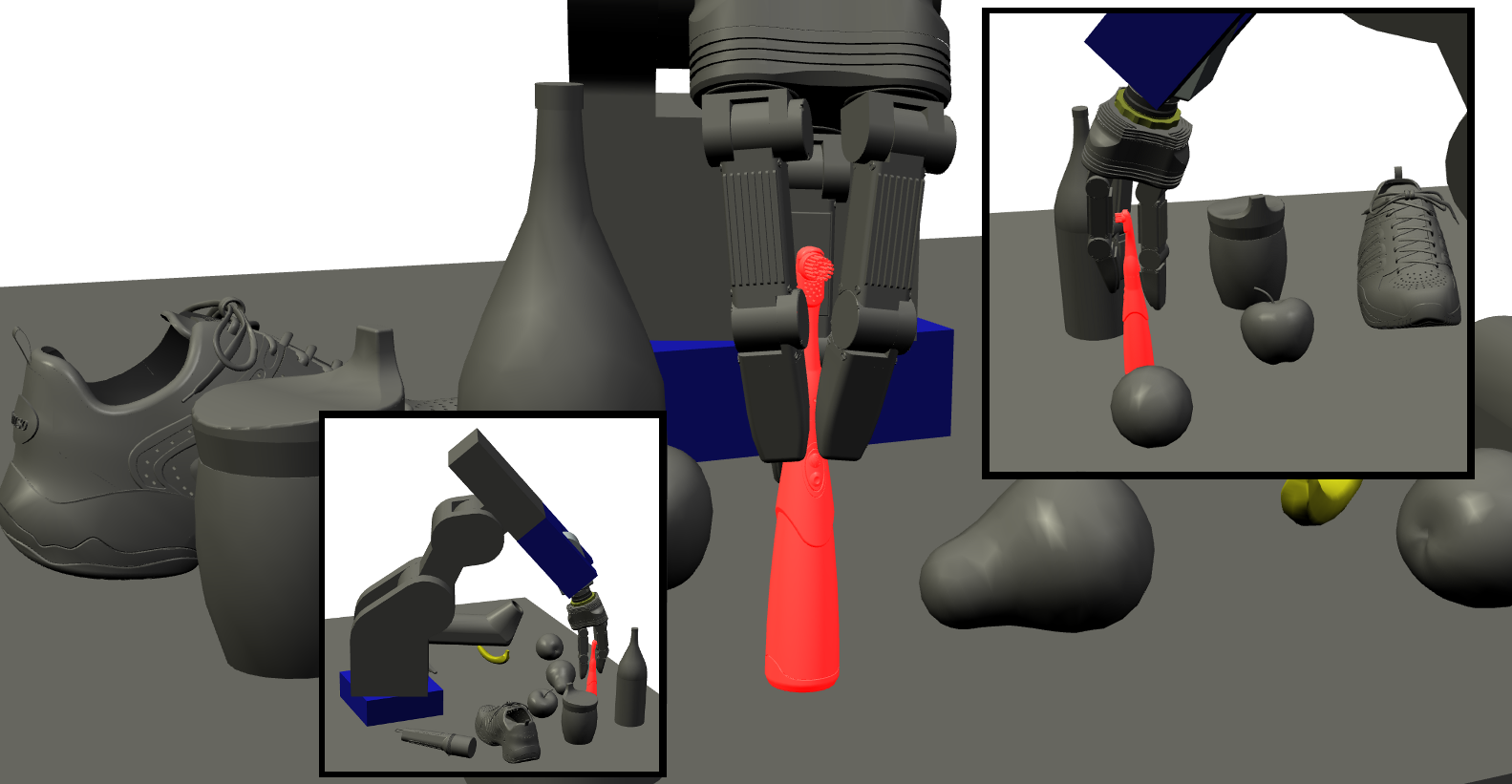
Fig. 2: A force-closure grasp of a toothbrush
TASK 11:
Recently, a poster was accepted at the CogSys Conference 2012 in Vienna, Austria.



