



Apr 13, 2012 , by
Public Summary Month 3/2012
TASK 3:
We finished the test of the first version of the SSVEP based object selection task with 19 participants. The maximum recognition rate was 91.7% (guessing level 25%). So far the SSVEP-paradigm provided the best results among the tested algorithms.
TASK 4:
We found a significant improvement to using the object’s flicker frequency alone when we included the 1st and 2 nd harmonic of the flicker frequency. No further improvement was found with different approaches of preprocessing, noise cancellation, frequency decomposition, channel selection and different classifier algorithms.
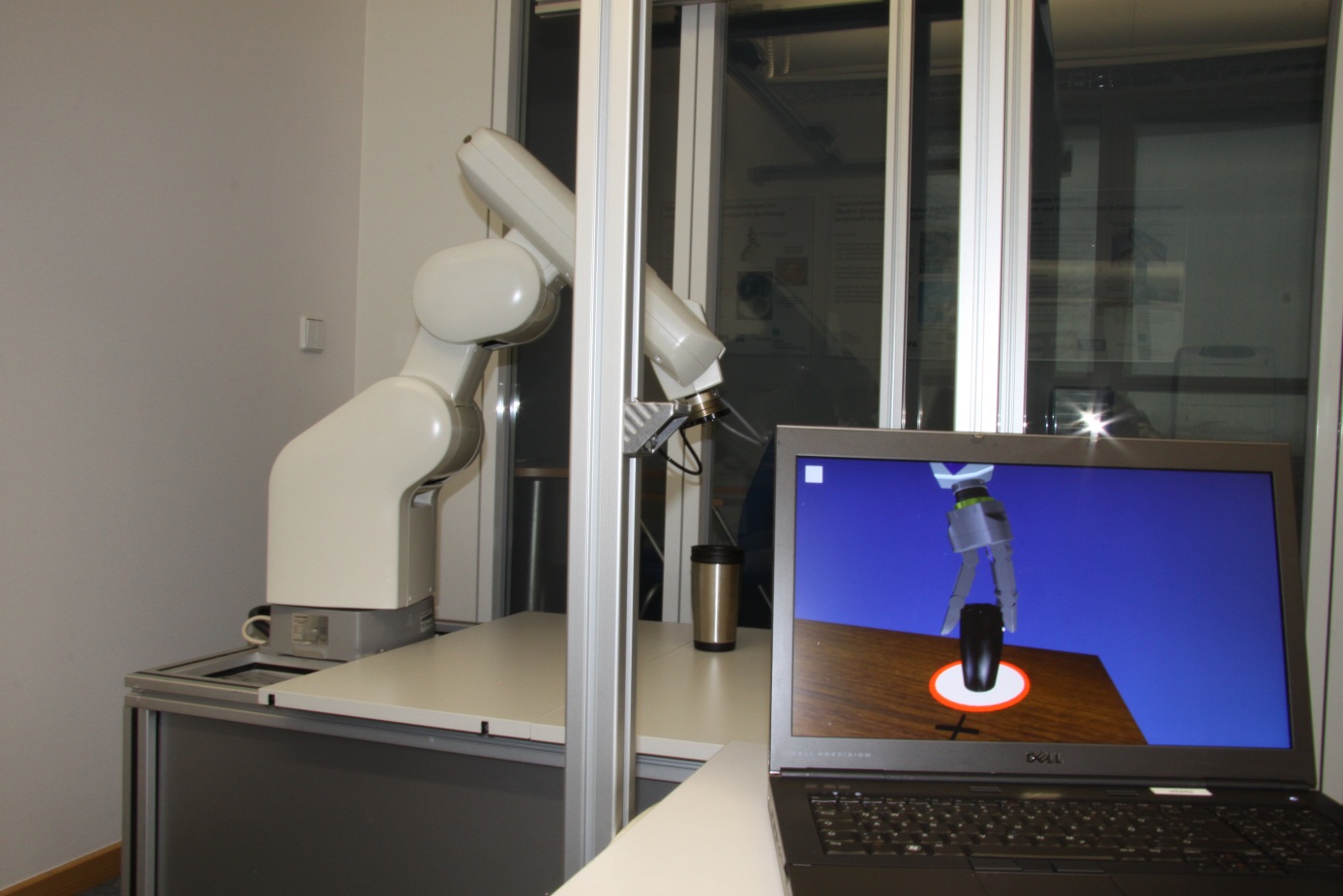
Figure 1: Demonstrator and virtual model
TASK 9:
A stereo-vision based object-recognition-system brings along a major additional complication compared to geometry imported from a 3D modeler: Only parts of the object surface visible to the cameras can be recognized. We realized during the experiment, the robot has a quite limited workspace. Consequently, an eye-in-hand-setup in fact makes no sense: Therefore we constructed a mechanical carrier holding the cameras in one specific position (see Figure 2).

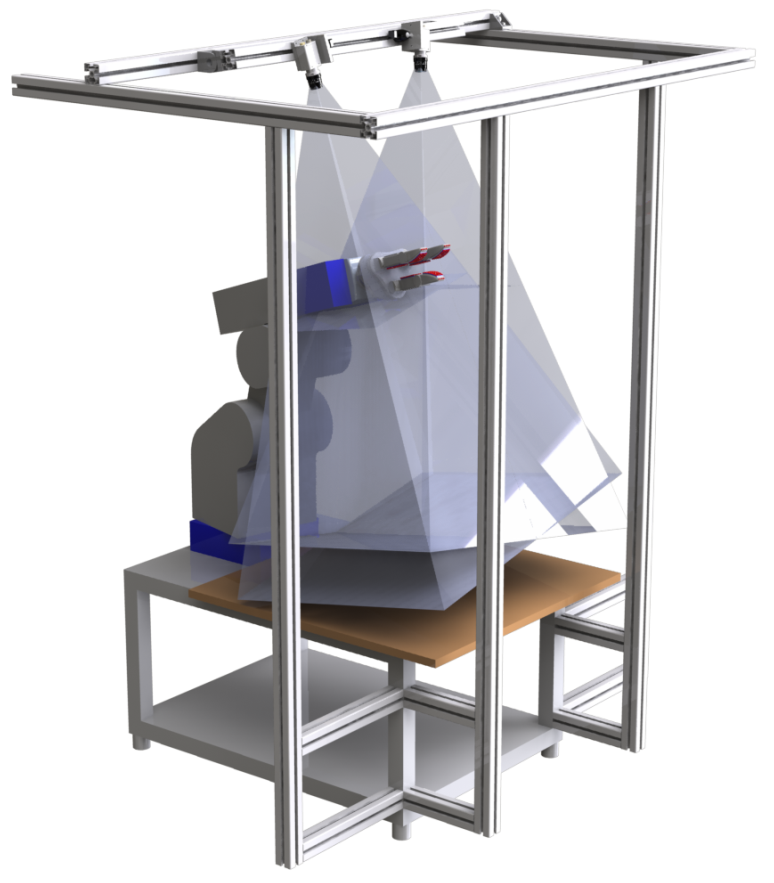
Figure 2: Current demonstator setup
TASK 11:
We finished the implementation of the new RESI communication methods. Now we can couple the robot with the MEG system over the Internet.



