



Jun 22, 2012 , by
Public Summary Month 5/2012
TASK 3:
We further investigated the motor imagery (MI) paradigm in more detail by evaluating the ability of 17 subjects to control the grasp initiation of a virtual arm. Our results indicate that good MI control in our BCI critically depends on the presence of µ‑rhythms Subjects who did not exhibit the rhythm could not achieve control.
We now extended the object selection paradigm such that a virtual robot performs a grasp of the object as feedback rather than displaying colored rings. Moreover, we successfully tested the system with the real robot moving simultaneously with the virtual robot.
TASK 4:
We improved our P300 based object selection setup. Specifically, we increased the number of selectable objects to six. The current paradigm also will serve to derive error signals from brain activity when erroneous feedback was provided.
TASK 9:
We realized that lighting conditions are critical for optimal stereo object recognition.
Therefore, we extended our setup by a dimmable light source (see Figure 1 and Figure 2 )

Figure 1: Object recognition system. The new system consists of two grayscale cameras and a dimmable lamp (2x55W).
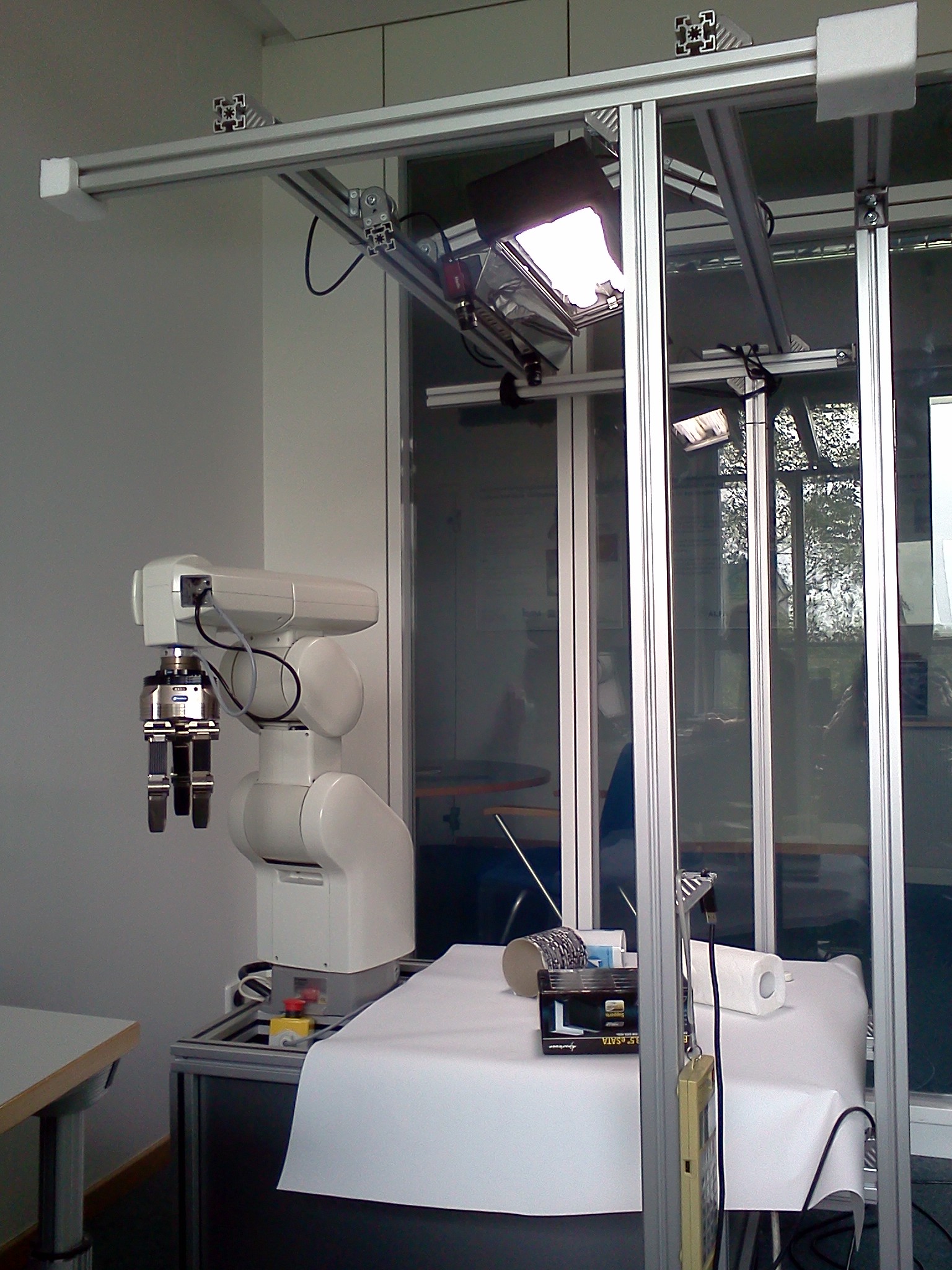
Figure 2: Current demonstrator setup
With improved image quality we succeeded in scanning different objects placed on the table in front of the robot (see Figure 3 and Figure 4).

Figure 3: Different test objects for optical recognition
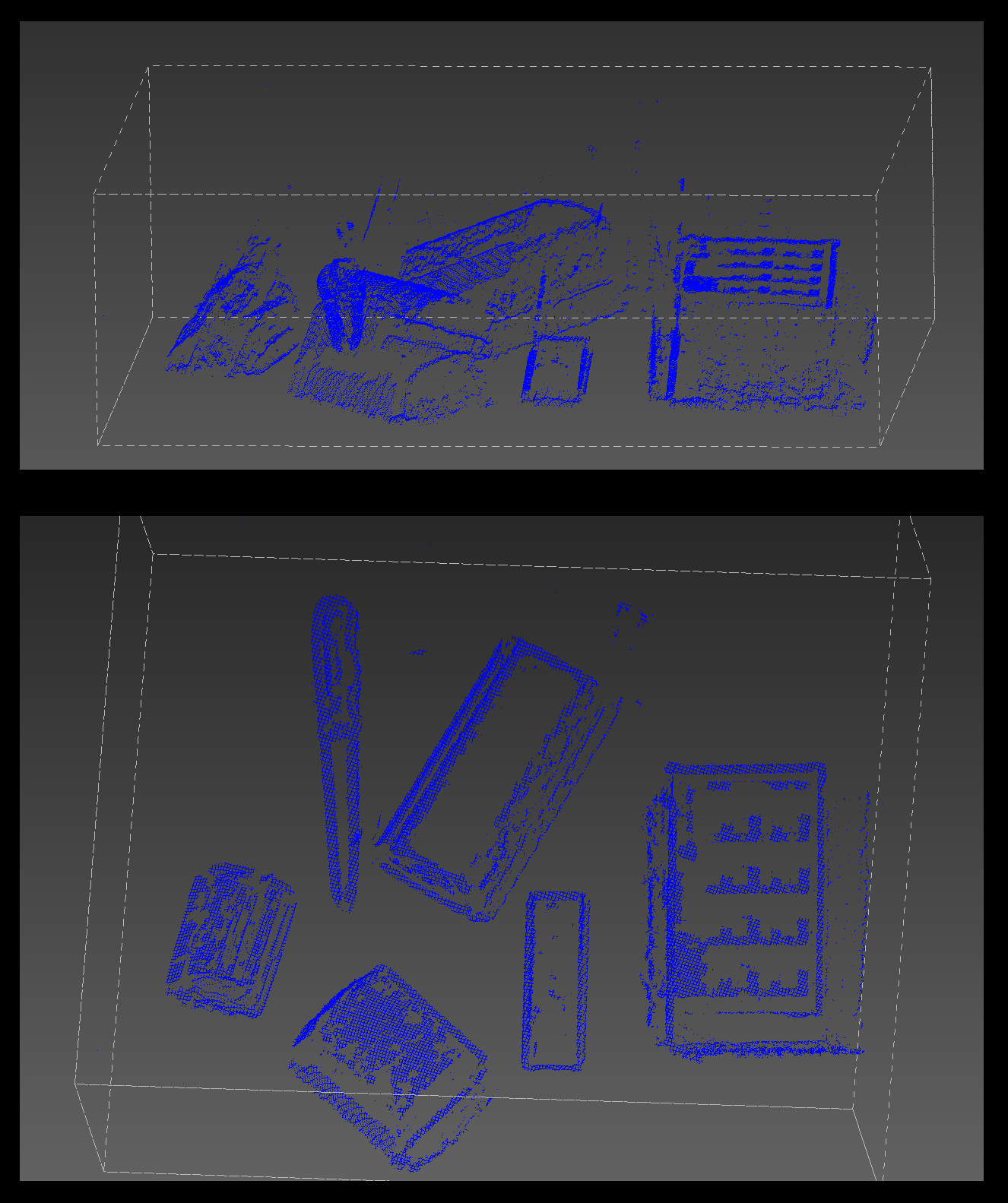
Figure 4: Point clouds obtained from the 3D object recognition system with improved illumination
TASK 11:
We submitted a multimedia report draft to ECHORD which is now embedded in our websites.



