



Jun 11, 2012 , by
Public Summary Month 5/2012
Sixth ECHORD public summary. Project C-Kompai
During April and May 2012 our main accomplishments include:
- Development of the low-level communication of programs/modules from the C-Brain of C-Robots and the existing software of the Kompai platform from Robosoft.
- Development of the associated interfaces for the added buttons (MAP, CLEAN, and BEHAVIOUR) and screens to Kompai’s GUI (Figure 1).
- Completion of the hardware modifications on the Kompai (by Robosoft) (Figure 2).
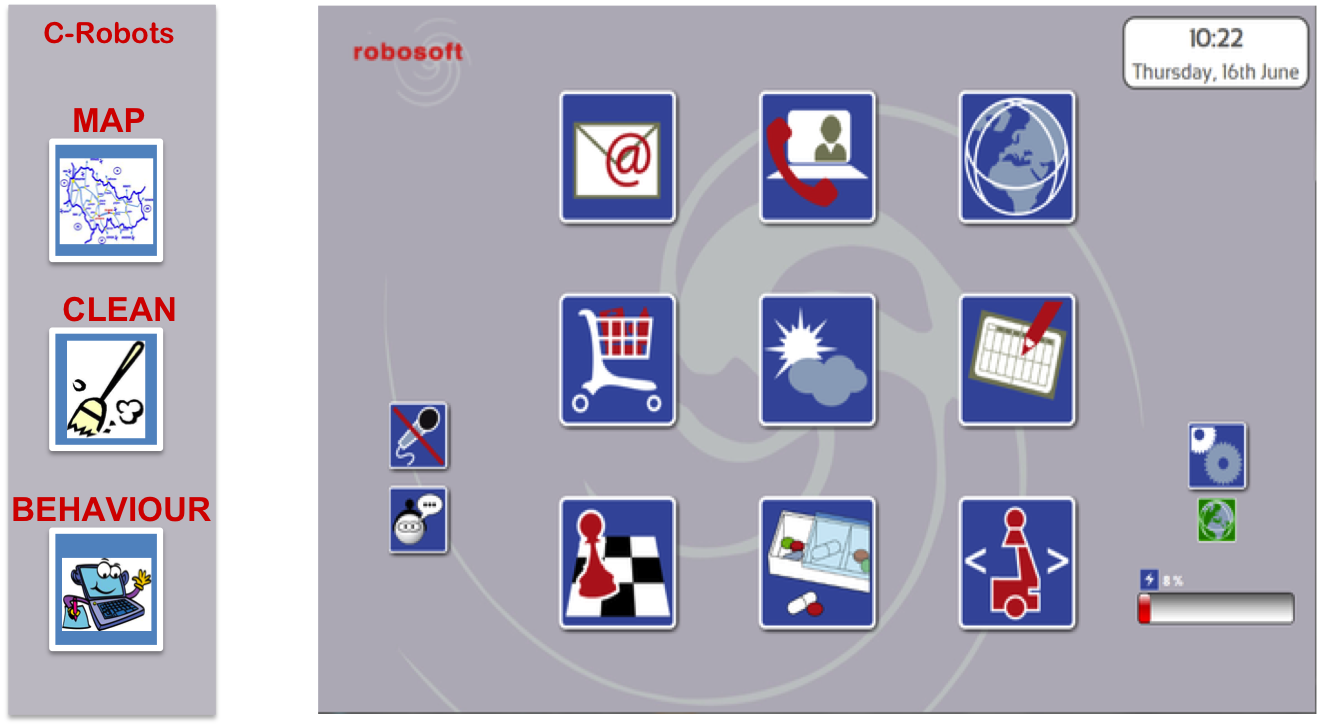
Figure 1. a) Kompai’s original GUI; b) Extended functionalities provided by C-Brain for the project.

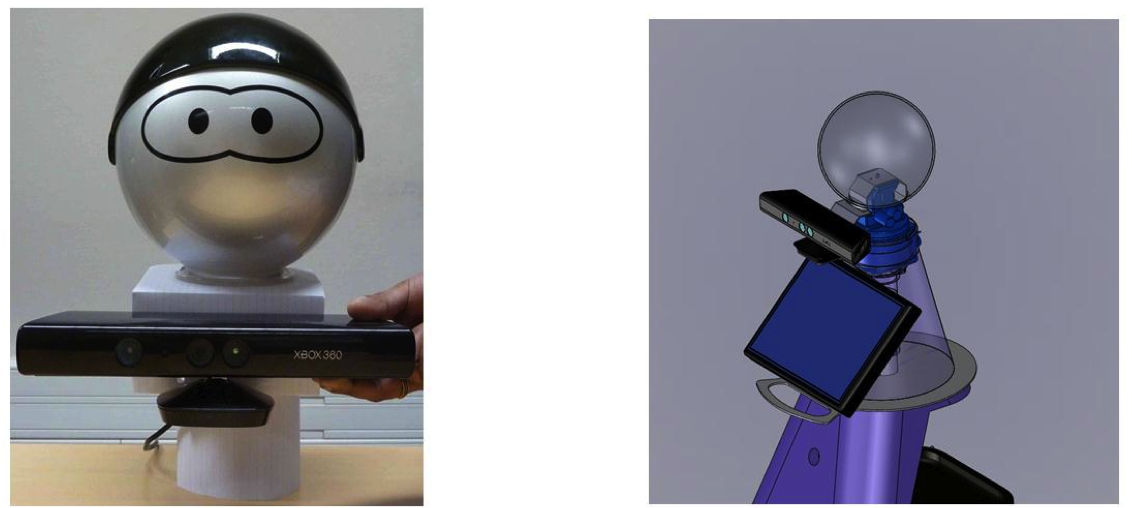
Figure 2. New hardware features added to the Kompai platform for the project: the vacuum cleaner and the 3D Kinect sensor.
At this point of the project, the software development from C-Robots is basically done. The benefits of the incorporation of the C-Brain into the Kompai platform, accomplished during this project, are the following:
1- Autonomous map creation. Before the incorporation of C-Brain into the Kompai platform, it was necessary a technician from Robosoft to create the map of a new home. With the C-Brain, the Kompai will create the new map by itself, not only the first time it arrives to a new home, but every single time the owner changes the layout of the home - without the need to call a technician again.
2- Obstacle avoidance in 3D. Before the incorporation of C-Brain, the Kompai was only able to perceive a line of the environment at the height of the laser sensor, which was very dangerous in a home environment, with a lot of obstacles at different heights. Thanks to the incorporation of the Kinect sensor, Kompai is able to perceive obstacles in 3D around the home.
3- Landmark perception/detection. Both with the laser and the Kinect sensors, the distances collected from these sensors are processed to extract the most significant landmarks of the environment (qualitative information), which will allow the robot to reason and make decisions. This is part of the patent pending, proprietary software of the “Cognitive Brain for Service Robotics” from Cognitive Robots.
4- The navigation system by Robosoft has been substituted by a more sophisticated one, which applies the ‘landmark perception/detection system’ (above) allowing the robot to reason and make further decisions.
5- Vacuum cleaning algorithms using the ‘landmark detection system’ allows the robot to know what it has done and what still needs to be done.
6- Decision making. Before the incorporation of C-Brain, Kompai has been a static robotic platform waiting for a ‘call to action’ by the user. With the incorporation of C-Brain, Kompai will be proactive and will start actions by itself to engage the user.
We are now working towards the final demonstration of the project in France.



