May 2, 2012 , by
Public Summary Month 5/2012
The general idea of the MoFTaG experiment is to use physical interaction with a human tutor to teach important areas in the working places and corresponding specific configurations to the robot. Our hypothesis is that such man-machine interaction (MMI) provides an intuitive way to teach an inverse kinematic to redundant robots by users of such assisting systems without needing an expert for programming the required robot kinematics. Of course, such a hypothesis raises a lot of questions like: Is such a physical MMI actually intuitive? For all users? Is it comfortable? How exhausting is the work with the robot arm? Is the reconfiguration of the robot practicable? How well and how fast can it be done? What are the characteristics of the training data provided by the naive users of the system?
To answer these questions we conducted a study with workers of Harting (HARTING Subsidiary - Development and Production for Industrial Connectors: HARTING Electric GmbH & Co. KG). The study took place at Harting from 10th to 16th of April. The experiment for each participant was divided into three main parts: a warm-up phase, reconfiguration phase (3 trials), and the wire-loop game. During the warm-up phase we showed a video, that informs about the two different operational modes. Furthermore, the participants had 2 minutes to become familiar with the robot arm and the physical interaction. During the reconfiguration phase the participant was asked to train the FlexIRob system according to a constrained working space. Once the system was trained, a reference movement (a straight line) was performed by the robot arm to give feedback to the participants. This procedure was repeated two more times. Finally, the participant was asked to play a variation of the wire-loop game. The task was to move the robot with the gripper along a given show-jumping course in the constrained working space. This game should simulate a tech-in of a concrete task to the robot. We had two conditions: The first group had to perform the task without assistance by the system. Hence, they had to take care of all the joints in order to not collide with the obstacles. The second group just needs to move the gripper. The joint configuration is controlled by our system through a network trained specifically to the current environment. We had 49 participants - 31 female and 18 male. They belong to the units 'cage assembly', 'mechanical processing', 'die casting', 'internal part production', 'machine assembly', and 'prefabrication'. They are truly naive with respect to physical interaction with such robots. At most, they might know big industrial (6DOF) robots behind "glass".
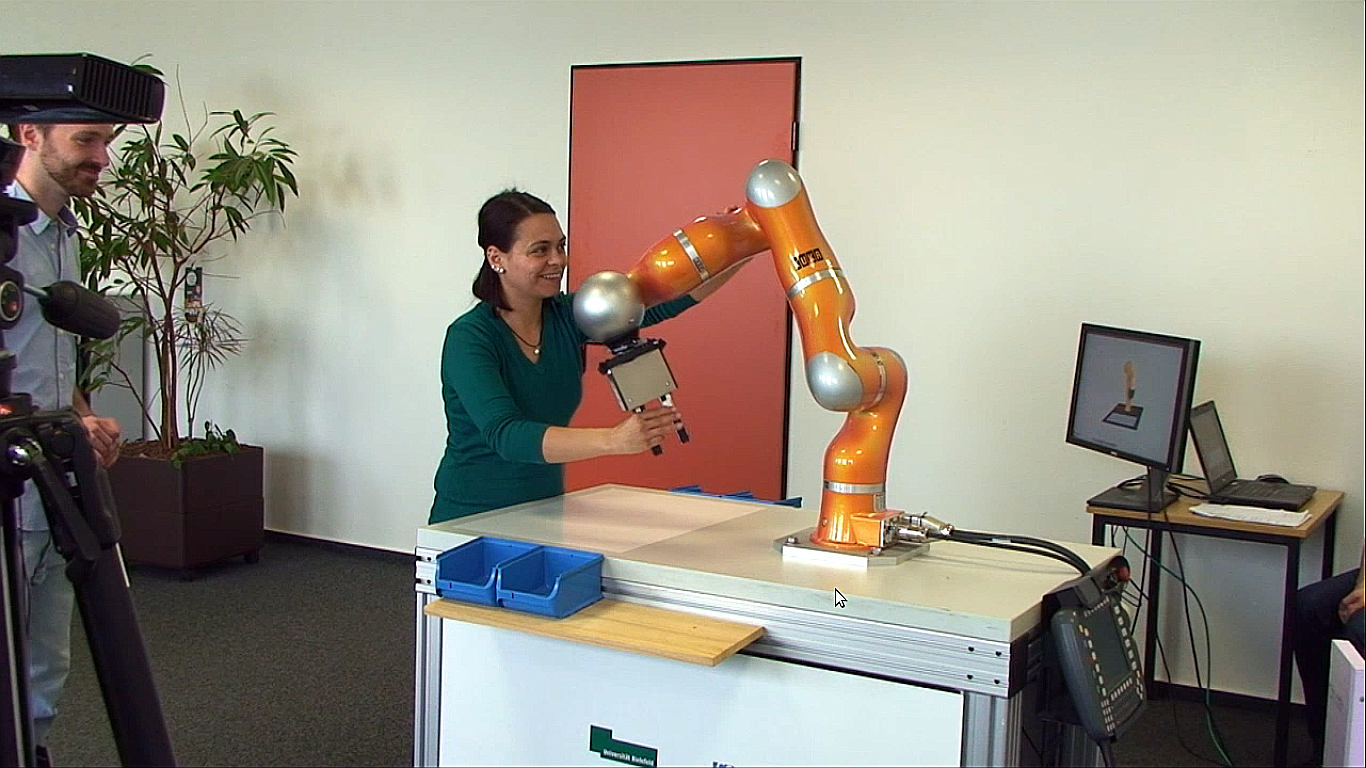
Some first impressions on the study results are: Our software system and the Kuka arm were running very stable. There were no breakdowns and overheating even though our FlexIRob system was running 13 hours per day and 4 days in total. All participants were able to finish successfully the study task. We observed a wide variety of interactions with the Kuka arm. Everyone played the assisted wire-loop game without any troubles independent from the problems he/she had in the warm-up and reconfiguration phase. Finally, we had the impression that everyone liked to interact with the Kuka arm. In particular, they seemed to have a lot of fun when playing with the Kuka arm, bending all joints, and transforming it to extremely unusual postures.