



Jan 27, 2012 , by
Public Summary Month 1/2012
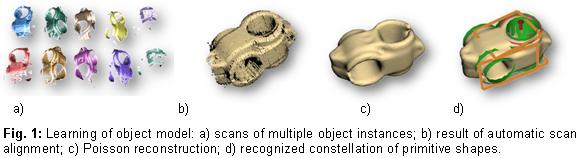
For learning object models, a board that allows for scanning of multiple object instances in different orientations was designed. The individual object views are segmented and registered. In the resulting point cloud, geometric primitives are detected.
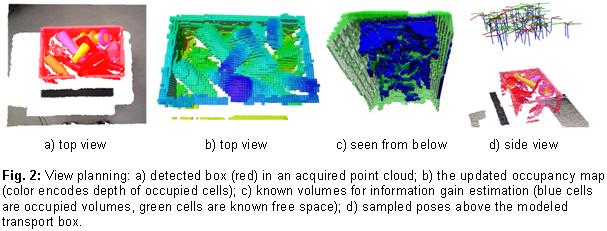
For active perception, sensor poses are sampled above the detected transport box. Their utility is evaluated according to the amount of unknown volume and the points not explained by detected primitives. The pose with the highest utility is chosen to acquire a new range scan.
Tags:
public summary



