



Jan 31, 2013 , by
Public Summary Month 1/2013
6th Public Report
Robot and controller were successfully set up and work as desired now (Figure 1). To improve the robot movement while holding the retractor tests on a phantom simulator on site were performed to evaluate necessary parameters for the control to achieve a smooth movement [Results Submitted, CARS 2013, Gundling et al. Title: Phantom simulator for retractor holding tasks in robot assisted hip surgery].
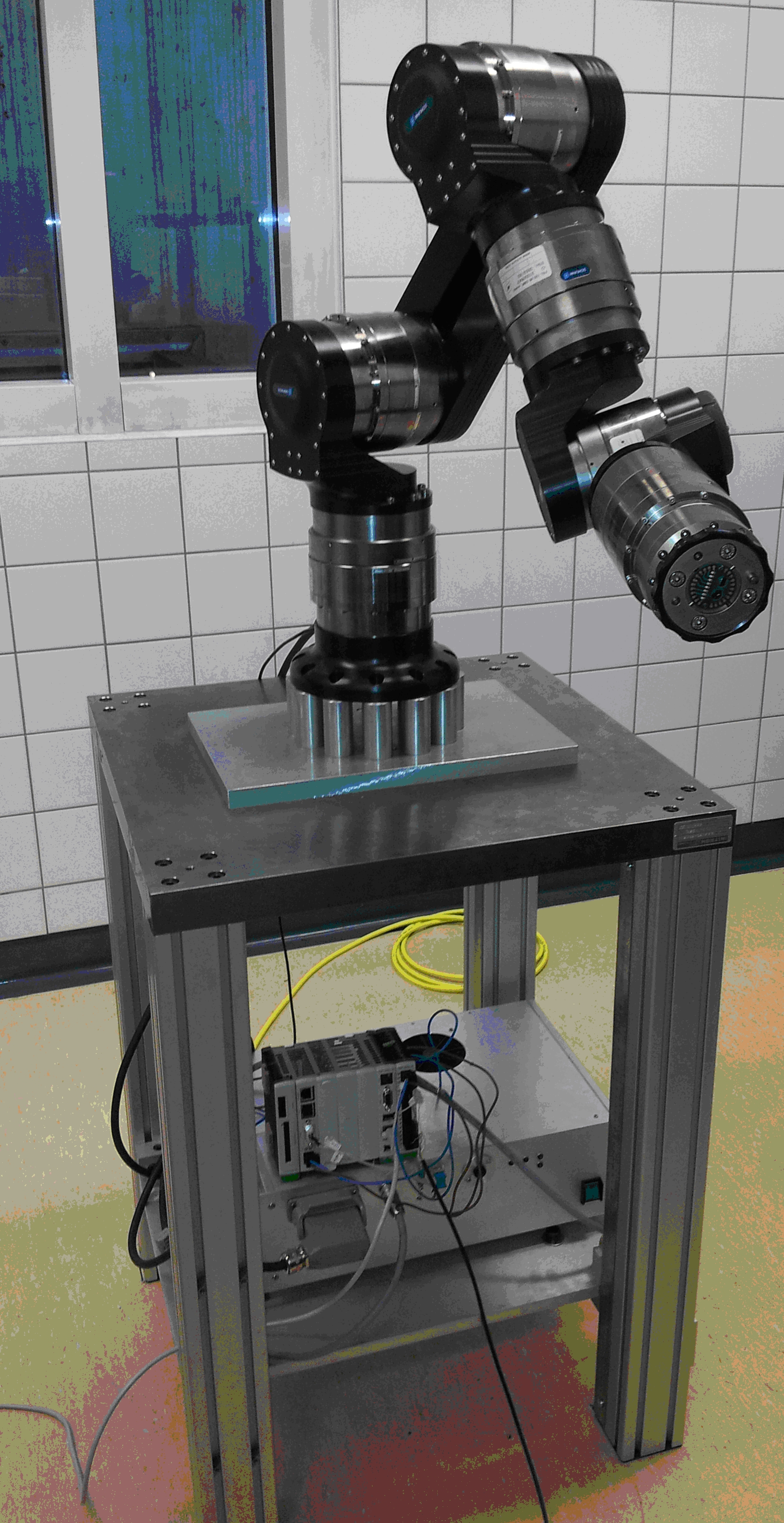
Fig. 1: Schunk lightweight robot arm mounted on a massive column.
Tags:
public summary



