



Jul 26, 2012 , by
Public Summary Month 7/2012
3rd Public Report
We recieved the robot controller and started working on the control algorithm successfully.
The communication interface between Control PC and Robot Controller was implemented. The control was programmed to command the robot between four different working modes. Since we don’t have all the hardware yet, all tests were conducted in simulation mode (Figure 1).
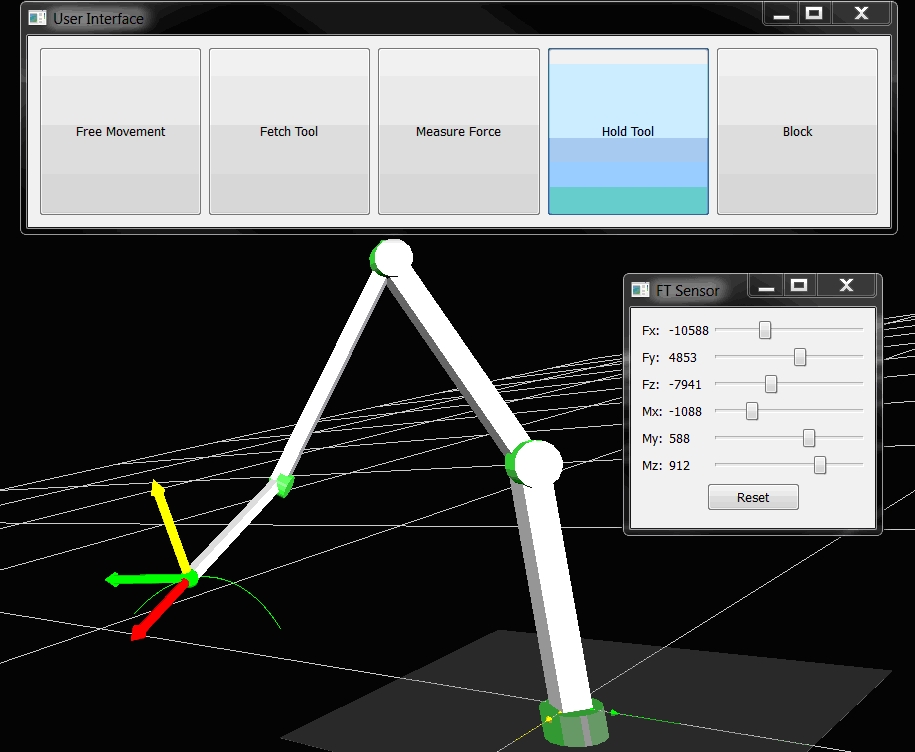
Figure 1 – The simulated robot holding and rotating the (imaginary) tool around the bone.
We acquired the camera and tested it successfully.
The gripper for holding surgical bone levers was redesigned to be shorter in length and allow to couple medical retractors from the front side.
To handle the risks brought along with utilizing a robot system medical and technical experts met and discussed what risks have to be handled and how this can be done.



