



Aug 8, 2011 , by
Public Summary Month 7/2011
Aim of the project: The LearnBiP experiment aims at improving the success rate in Bin-picking applications by learning and the use of dexterous hands. Current bin-picking systems use hand defined grasp positions as a basis to grasp objects in the bin. We want to improve this approach by incorporating the experience gained during previous grasping attempts into the grasp generation process. The results of this will be demonstrated on two industrial platforms (one with a two finger hand and one with a suction gripper) provided by the industrial partner Scape. In addition, we want to investigate the usability of a Schunk SDH-2 3-finger hand in these scenario. The 3-finger hand will be used in a separate setup provided by SDU.
Status of the project: The consortium has been working together efficiently. In the first half year most required preparations for real testing have been achieved (selection of objects and grippers (see Figs. 1 and 2), computation of grasp densities for all three gripper types (see Figs. 3 and 4), the set up of the bin picking system for the two finger gripper experiments (see Fig. 5), the purchase and physical mounting of the SDH 3 finger hand (see Fig. 5), visualization software for simulation and experimental results), the experiments with the two finger gripper on the Scape platform have already been started (see Fig. 5). Hence the project is on track and first results on the real physical set-up can be expected to be available in the next report.



Figure 1: Object selected for the experiements.
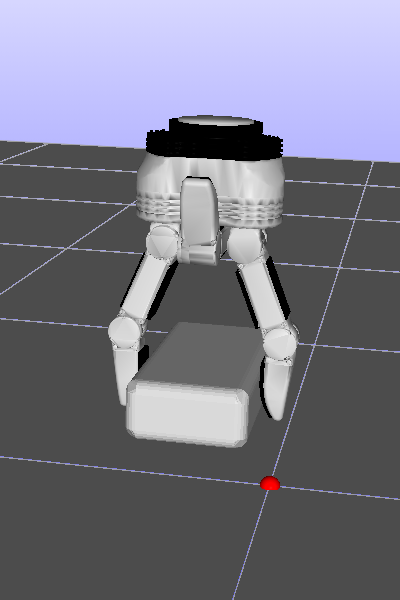
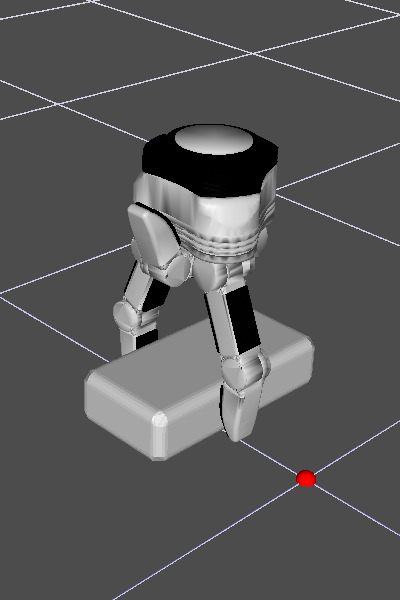
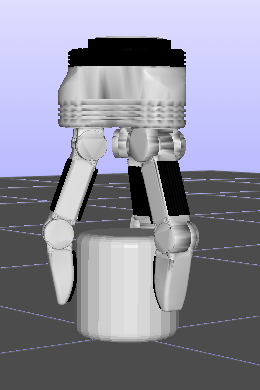
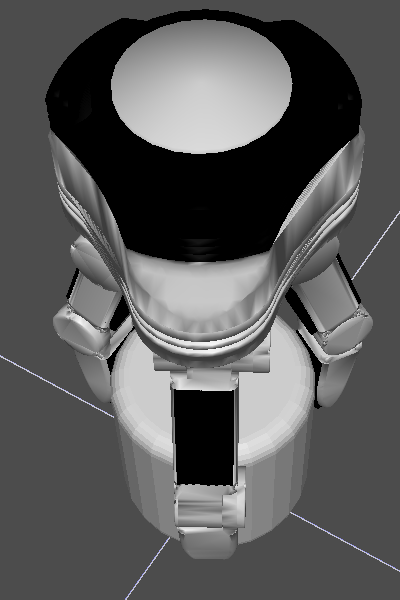
Figure 2: The two grasp types to be investigated with the 3-finger hand.
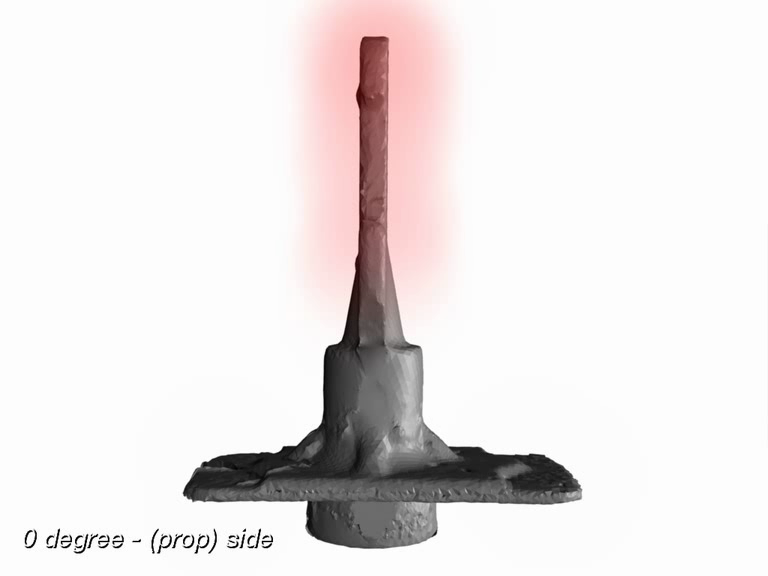
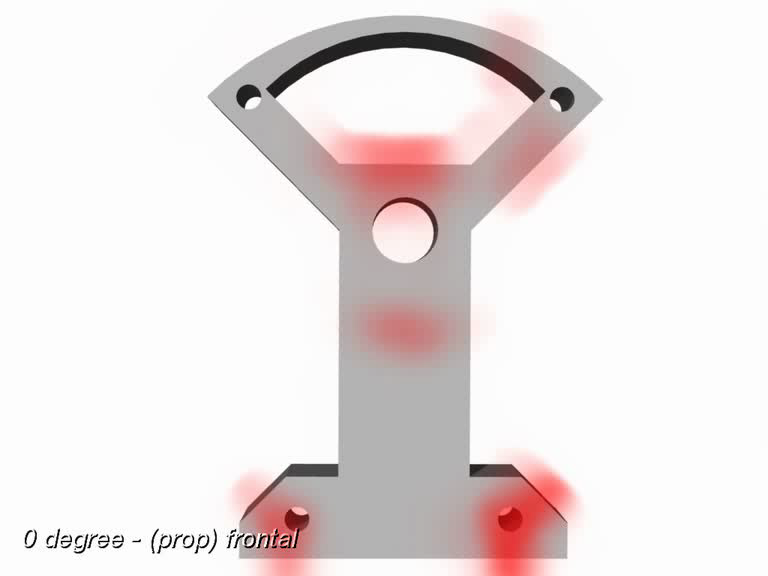
Figure 3: Grasp densities generated for 2 objects. Please click on the image to see a video that shows more detail.
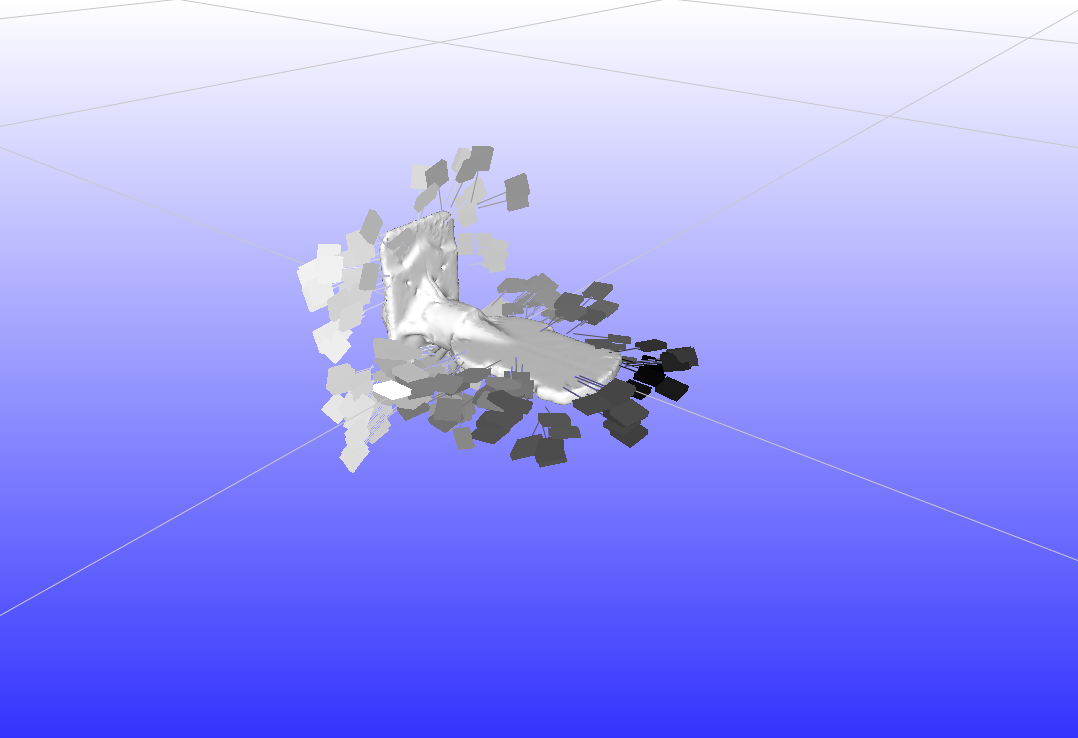
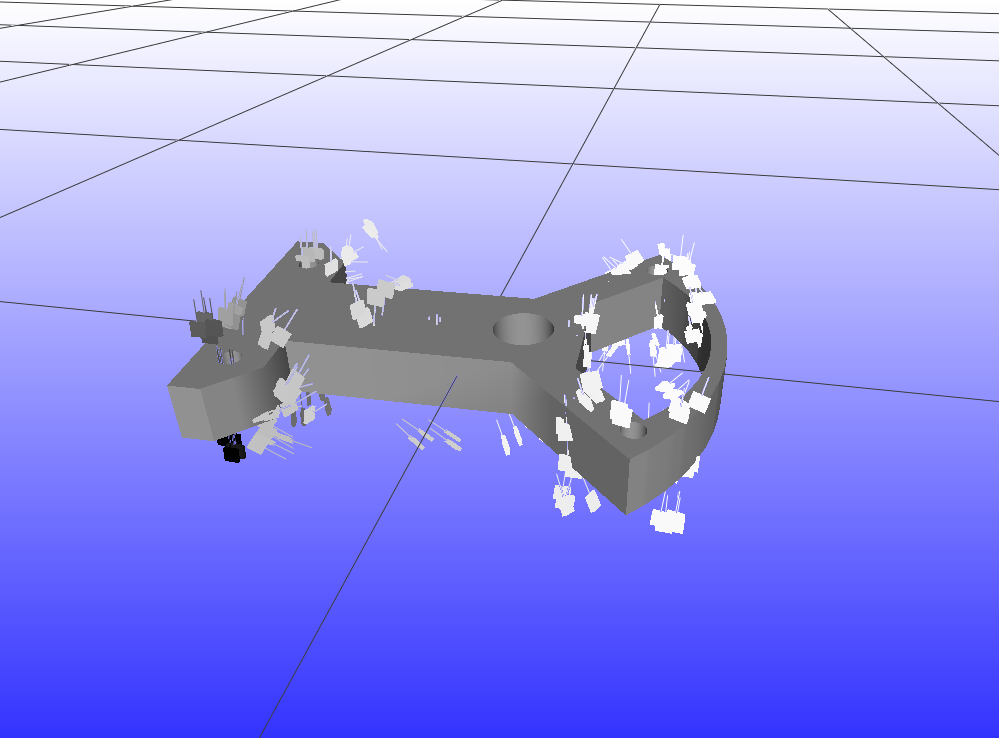
Figure 4: Sampled grasp densities that can be used for actual execution. Please click on the image to see a video that shows more detail.

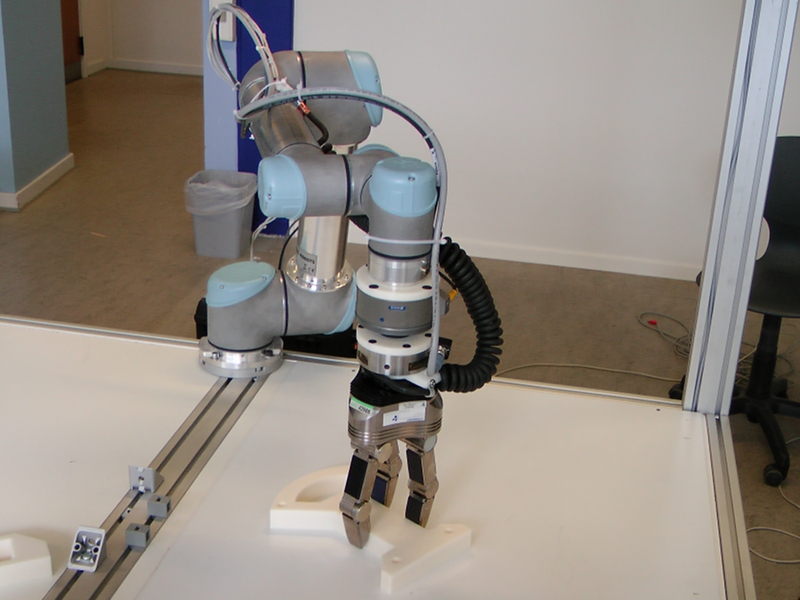
Figure 5: The 2-finger and the 3-finger setups.



