



Jul 23, 2012 , by
Public Summary Month 7/2012
The ODEUO experiment was concluded using more vibrating masses at the same time and finally getting observations of “real” test objects.
Different mounting suspensions coming from the automotive industry as well as packaging boxes were evaluated.
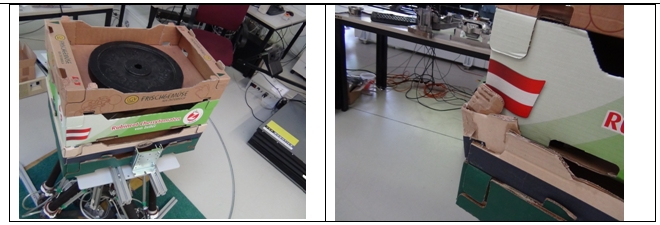
Example of a mesurement cycle to detect damages on packaging boxes
For dissemination purposes the experiment is made public on the homepage of the robotic institute of the Linz University, and linked to echord homepage (see www.robotik.jku.at – research – echord).
We also participated at the conference OPTIROB 2012 in Romania, Mamaia which was held from the 21 to the 23 of June. (http://www.wix.com/olaruadrian/optirob2012)
The paper “A Pneumatically Driven Stewart Platform Used as Fault Detection Device” is printed in the journal of the conference and attached here (OPTIROB_Hexapod_LaTex.pdf), the conference presentation is available here (OPTIROB2012_ODEUO.pdf).
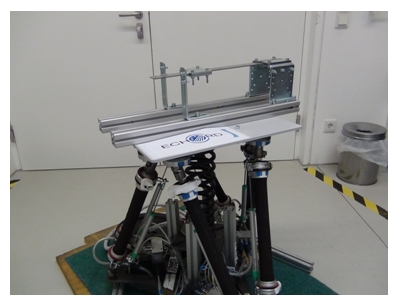
This picture shows the basic setup of the ODEUO experiment, for sensorless detection of unknown vibrating objects.
See also some videos of the test bench (testbench.mp4) as well as tests with “real” objects like motor suspensions (motor_suspension.mp4) or packaging boxes (packaging_boxes.mp4).
A multimedia report of the whole experiment is visible here, in different video formats ( Echord_Odeuo_Multimedia_5_640x480.wmv, Echord_Odeuo_Multimedia_5_640x480.mp4, Echord_Odeuo_Multimedia_5_640x480.mov, Echord_Odeuo_Multimedia_5_640x480.avi ).
Video for mobiles in low resolution: Echord_Odeuo_Multimedia_5_640x480.3gp
May 31, 2012 , by
Public Summary Month 16/2012
The experiment with different vibrating masses vibrating into different directions showed a very good detection sensitivity of low vibrating masses, down to 0,5% of the payload range. This means that with the Stewart platform capable to move 20kg, a mass of 100g had been detected, if it was vibrating in the predefined frequency range between 5 and 18 Hz.
Moreover the verification of the theoretical approach gave an excellent accordance between model and physical setup, in the first three of the six degrees of freedom that were analyzed.
In the final project stage this verification will be extended to all six DOF’s of the hexapod.
The experiment is made public on the homepage of the robotic institute of the Linz University, and linked to echord homepage (see www.robotik.jku.at – research – echord).
We also participate at the conference OPTIROB 2012 in Romania, Mamaia which is held from the 21 to the 23 of June. (http://www.wix.com/olaruadrian/optirob2012)
The paper title is “A Pneumatically Driven Stewart Platform Used as Fault Detection Device” and is printed in the journal of the conference.
Attached you can find a video of the actual test bench ( Echord_Odeuo_640x480.mp4)
Mar 30, 2012 , by
Public Summary Month 14/2012
The implementation and verification of the experiment continues, using the special designed spring and mass system.
In this way the vibrating mass can be fixed to the hexapod in different angles and at different positions.
Finally at end of experiment different vibrating masses, positioned at different positions should be identified.
Starting with the results of the last 2 months, vibrations were clearly identified using a mass of 500 g and shaken in vertical direction.
In the next months measurements will be spread to more different masses vibrating in different orientations.
Dissemination
There was a video presentation for the "eu robotics week" http://www.robotics-labs.eu see Institute for Robotics - Linz University.
The ODEOU project will be pubilshed at the homepage of the Institute within the next weeks.
We plan a poster presentation at the automatica fair in munich in may 2012 and
a conference participation at OPTIROB 2012, Mamaia, Romania.
Jan 27, 2012 , by
Public Summary Month 1/2012
The theoretical base to identify the transfer functions of the vibrating hexapod with and without lose mass was elaborated and is described in milestone 2 (M12)
The experimental implementation and verification of this theory was started in the last month, using vibration sweeps of the hexapod from 0 to 30 Hz.
In the attached movies this movements are visible, first in slow motion, to distinguish all 6 degrees of freedom, and also in real speed vibrating in the vertical direction with a frequency going from 0 to 30 Hz.
(see odeuo_slow.wmv and odeuo_sweep.wmv)
In the next steps these measurements will be repeated with a mounted vibrating test mass, trying to identify it sensorless.
Nov 29, 2011 , by
Public Summary Month 10/2011
Parameter identification
The frequency model described in month 8 works for a one dimensional excitation with a centered mass.
This theoretical result has to be prooved in a first experiment.To verify it on the moving platform a special test mass was developed. The basic test assumption states that the load separates in two masses connected via a spring. A flat spring connecting base mass and additional vibrating mass was used, to have a defined direction of movement.
Hardware adaptation
Adaptation of experimental hardware was started with focus on a new electronic control hardware, to overcome synchronization errors in the control of more DOF’s.
The hexapod is drived by 6 pneumatic actuators, each of them has an integrated position sensor, a pressure sensor, a servo valve and/or a digital valve. These signals have to be synchronized through all degrees of freedom.
The design was therefore chosen following a modular structure.



