Jul 27, 2011 , by
Public Summary Month 7/2011
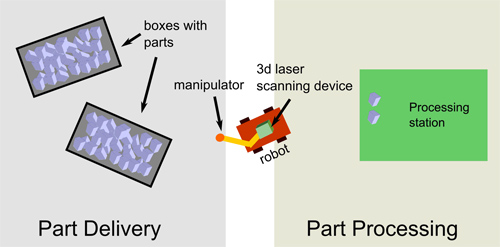
In the ActReMa experiment, a robot delivers parts to a process station. The robot is equipped with a 3D scanning sensor. It must recognize objects in a box and grasp them.
The experiment partners started their work according to the plan. For two scenarios: a mobile robot and a stationary robot, the sensor placement has been decided. Objects are detected using the fitting of shape primitives. The robot has been modeled for the simulation of grasp and motion planning. Objects can now be grasped flexibly from a table.