Sep 27, 2011 , by
Public Summary Month 9/2011
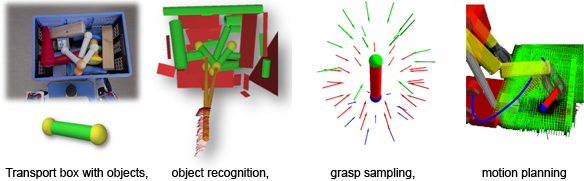
The experiment partners continued work on object recognition, grasp selection, and motion planning for picking objects out of a transport box.
The primitive-based object recognition has been accelerated and made more robust. Now, 2D contours are also considered for recognition. The best visible object is selected.
Grasps are sampled, checked for collisions, and ranked offline. In the current situation, we check for reachability with our robot arm, collisions with the transport box and other objects, and plan reaching motions.
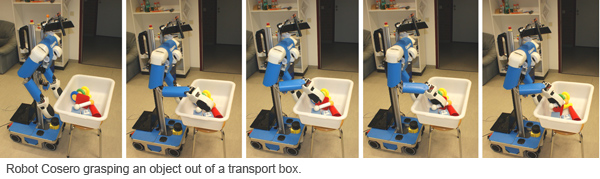
The components have been integrated in simulation as well as for the real robot Cosero.