FREE - Flexible and safe interactive human-robot environment for small batch exacting applications
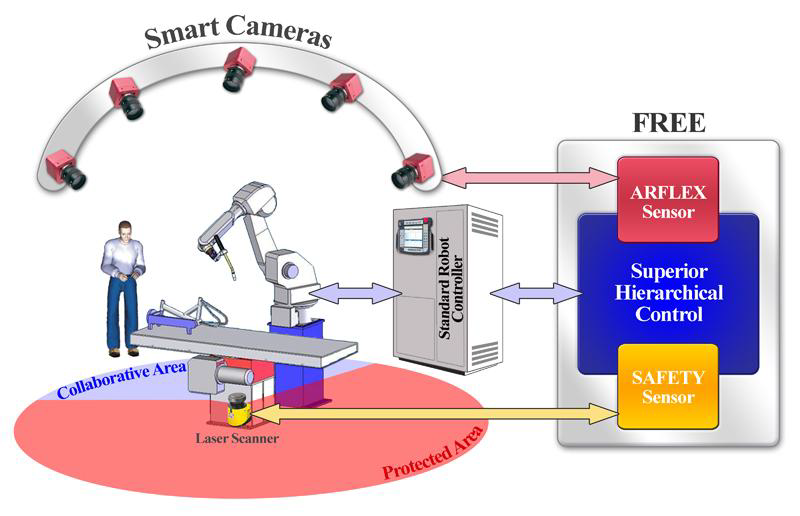
FREE addresses the sector of small batch production where manual work is still the main manufacturing option since the introduction of automated systems is costly and lacks the necessary flexibility. FREE aims at contributing to change this situation by offering to SMEs affordable, safe, accurate, low-cost robotics solutions moving towards the concept of a flexible and safe interactive human-robot environment, achievable by combining robot equipments with the most advanced safety and control technologies. The FREE basic idea is the introduction of a further control loop operating at a level hierarchically superior with respect to the standard robot controller, interfaced with the human operator and equipped with a set of sensors able to provide contact-less robust measurements of body pose (including the robot tool pose) and of human operator position within the robot working area. The achievement of the main S&T objectives, namely “enhanced human-robot interfacing and safety”, “robot flexibility”, “improvement of the robot tool position and attitude accuracy”, will be measured in any key aspect by reproducing the assembly process of metal sheets.
 |
|